The BPL is a high-performance DC powered drive for position velocity and torque control of brushless and brush motors via CANopen. Drive commissioning is fast and simple using CME 2™ software operating under Windows® and communicating with the BPL via RS-232. The BPL operates as a CANopen DS-402 node. Supported modes include: Profile Position-Velocity-Torque Interpolated Position Mode (PVT) and Homing. Feedback from both incremental and absolute encoders is supported. A multi-mode encoder port functions as an input or output depending on the drive’s basic setup.
CONTROL MODES
• Profile Position-Velocity-Torque Interpolated Position Homing
• Camming Gearing
• Indexer
COMMAND INTERFACE • CANopen
• AsCII and discrete I/O
• stepper commands
• ±10V position/velocity/torque
• PWM velocity/torque command
• Master encoder (Gearing/Camming)
COMMUNICATIONS • CANopen
• Rs-232
FEEDBACk
Incremental Encoders
• Digital quad A/B
Analog Sin/Cos
Panasonic Incremental A Format
• Aux. quad A/B encoder / encoder out
Absolute Encoders
• ssI EnDat Absolute A
Tamagawa & Panasonic Absolute A
sanyo Denki Absolute A Biss (B & C)
Resolver (-R option)
• Brushless Resolver
Other
• Digital Halls
I/O DIgITAL
• 6 High-speed inputs
• 1 Motor over-temp input
• 4 Opto-Isolated inputs
• 3 Opto-Isolated outputs
• 1 Opto-Isolated brake output
I/O ANALOg
• 1 Reference Input 12-bit
sAfE TORqUE Off (sTO)
• sIL 3 Category 3 PL d
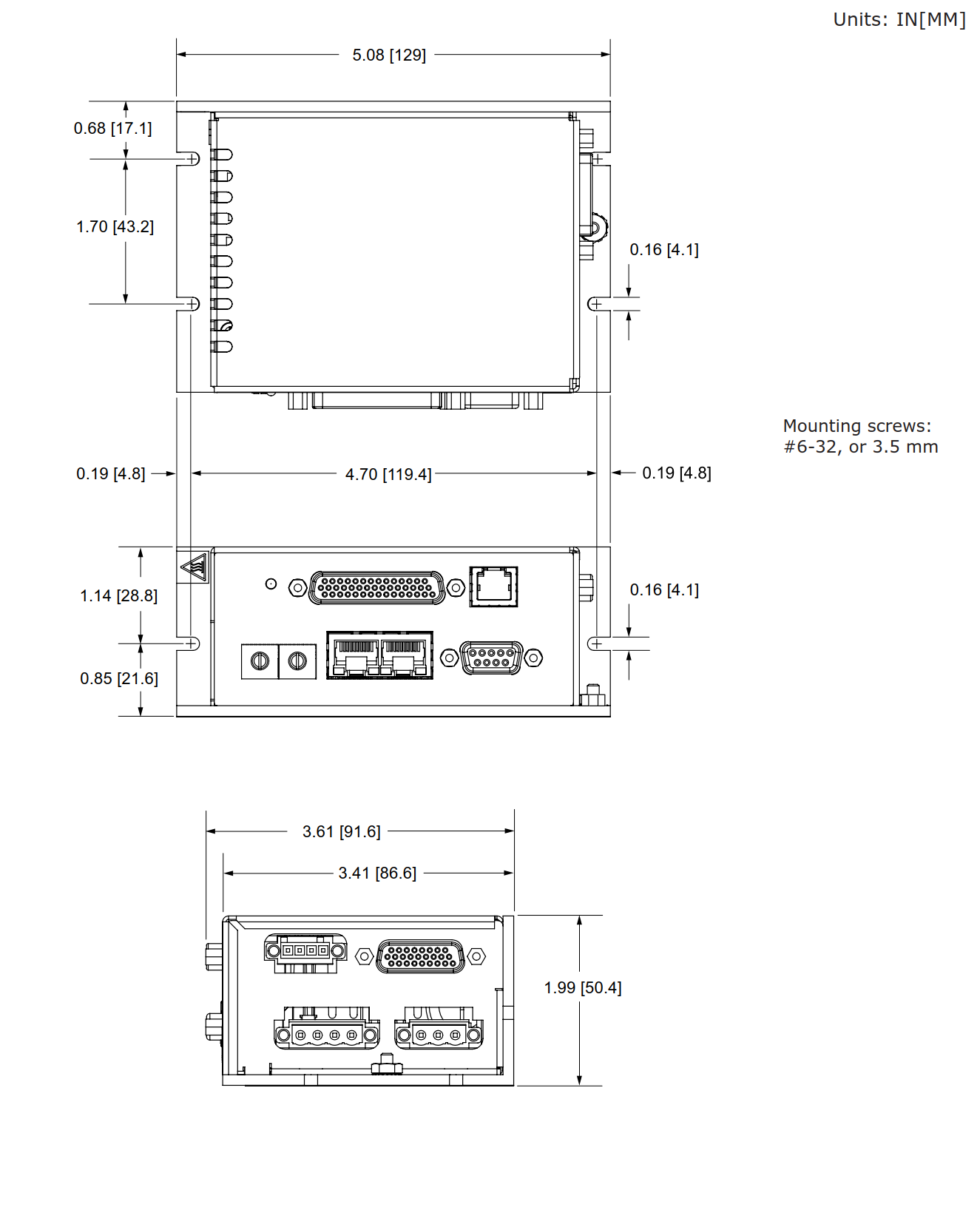
DIMENSIONS: IN [MM]
• 5.08 x 3.41 x 1.99 [129 x 86.6 x 50.4]
• 5.08 x 3.41 x 3.39 [129 x 86.6 x 86.1] with heatsink

 Home >> Products >> Drive Control >> COPLEY >> Accelnet Series
Home >> Products >> Drive Control >> COPLEY >> Accelnet Series